连接crobot
crobot的第二层亚克力板上放置了思科路由器:账号:cisco密码:cisco
上位机连接crobot路由发射的WiFi
- WiFi:
crobot
password:20180604ymd
通过ssh远程登录crobot:
dufaxing@ubuntu:~$ ssh stone@192.168.1.100
stone@192.168.1.100’s password: 8662182
以下command以stone@crobot开头都指的是通过ssh在crobot远程执行,其他则是在本机执行。
crobot功能包
- crobot_application:为了WIA-PA组采集机器人数据写的脚本,无其他用途
- crobot_bringup:crobot启动相关功能包。
- crobot_description:crobot模型描述相关功能包。
- crobot_mapping:crobot建图相关功能包。
- crobot_navigation:crobot导航相关功能包。
- crobot_teleoperation:crobot键盘控制相关功能包。
- crobot_vision:crobot二维码视觉引导相关功能包。
crobot_package源码:
链接:https://pan.baidu.com/s/1DijsZm5wNugWkor8wuYdmA
提取码:455p
crobot仿真模型
//启动机器人模型
dufaxing@ubuntu:~$ roslaunch crobot_bringup fake_crobot.launch
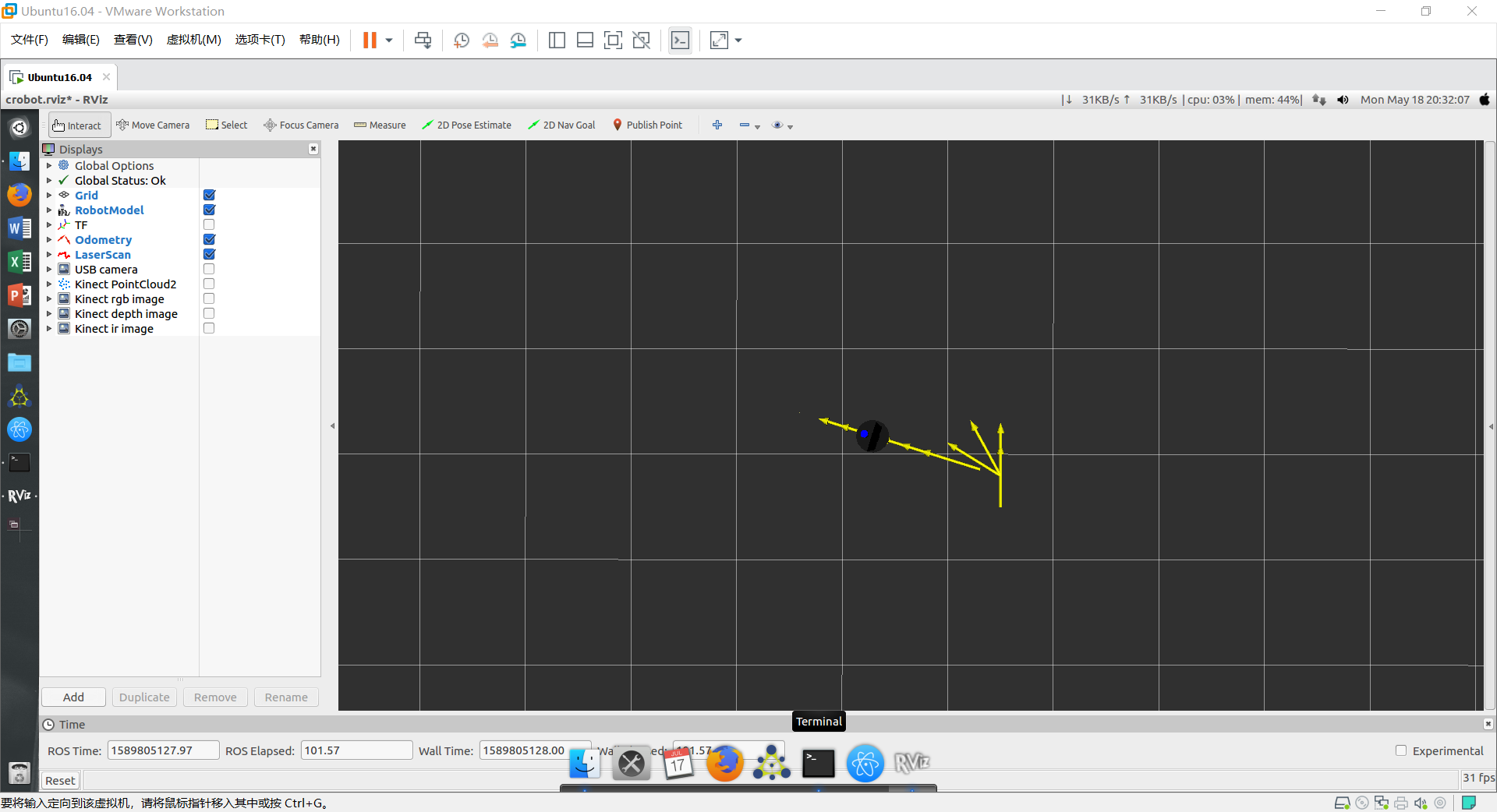
//在rviz中显示机器人模型
dufaxing@ubuntu:~$ roslaunch crobot_bringup crobot_rviz.launch
//启动键盘控制
dufaxing@ubuntu:~$ roslaunch crobot_teleoperation keyboard_teleoperation.launch
以上三个命令可以启动crobot仿真模型,并通过键盘控制模型移动。需要注意的是读取键盘需要权限sudo chmod 777 /dev/input/event1
,若不清楚键盘对应的event,运行./src/crobot/crobot_teleoperation/scripts/按键检测/目录下的python event_test.py来检测键盘对应的事件。
启动效果如下图所示
gmapping建立地图
//启动机器人
stone@crobot:~$ roslaunch crobot_bringup crobot.launch
//启动雷达
stone@crobot:~$ roslaunch crobot_bringup lidar.launch
//启动gmapping建图
stone@crobot:~$ roslaunch crobot_mapping gmapping.launch
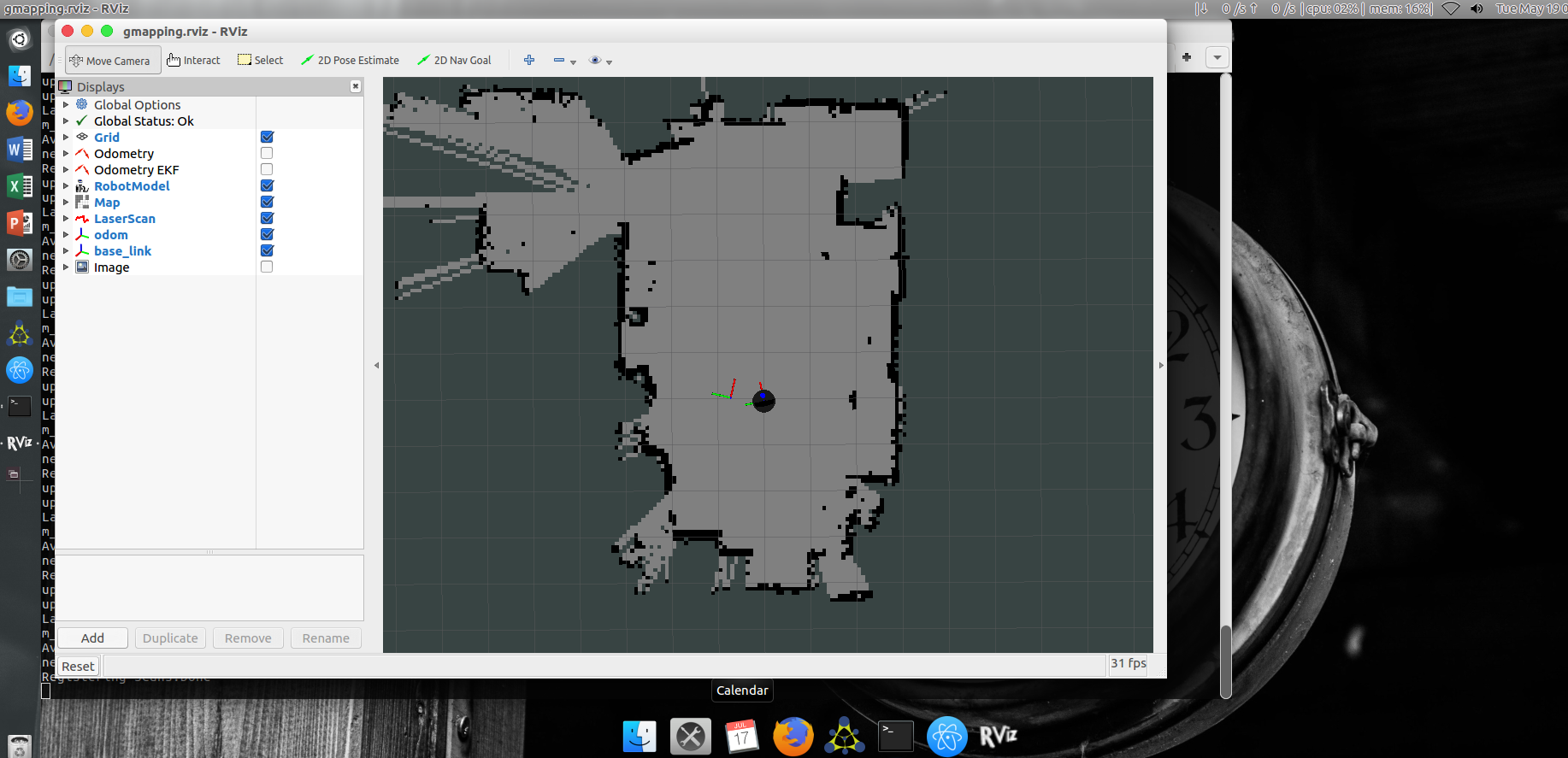
//本地启动rviz查看建图过程
dufaxing@ubuntu:~$ roslaunch crobot_mapping gmapping_rviz.launch
//启动键盘,控制机器人移动,方便建图
dufaxing@ubuntu:~$ roslaunch crobot_teleoperation keyboard_teleoperation.launch
//新建的地图保存在当前目录
dufaxing@ubuntu:~$ rosrun map_server map_saver -f map
注意建图过程中,应使键盘控制crobot速度较慢,同时不允许crobot轮胎打滑、空转。
建图效果如下所示:
导航
将上一步建图保存的地图信息map.pgm,map.yaml,放入crobot地图目录下/home/stone/maps。
//启动机器人
stone@crobot:~$ roslaunch crobot_bringup crobot.launch
//启动雷达
stone@crobot:~$ roslaunch crobot_bringup lidar.launch
//启动导航
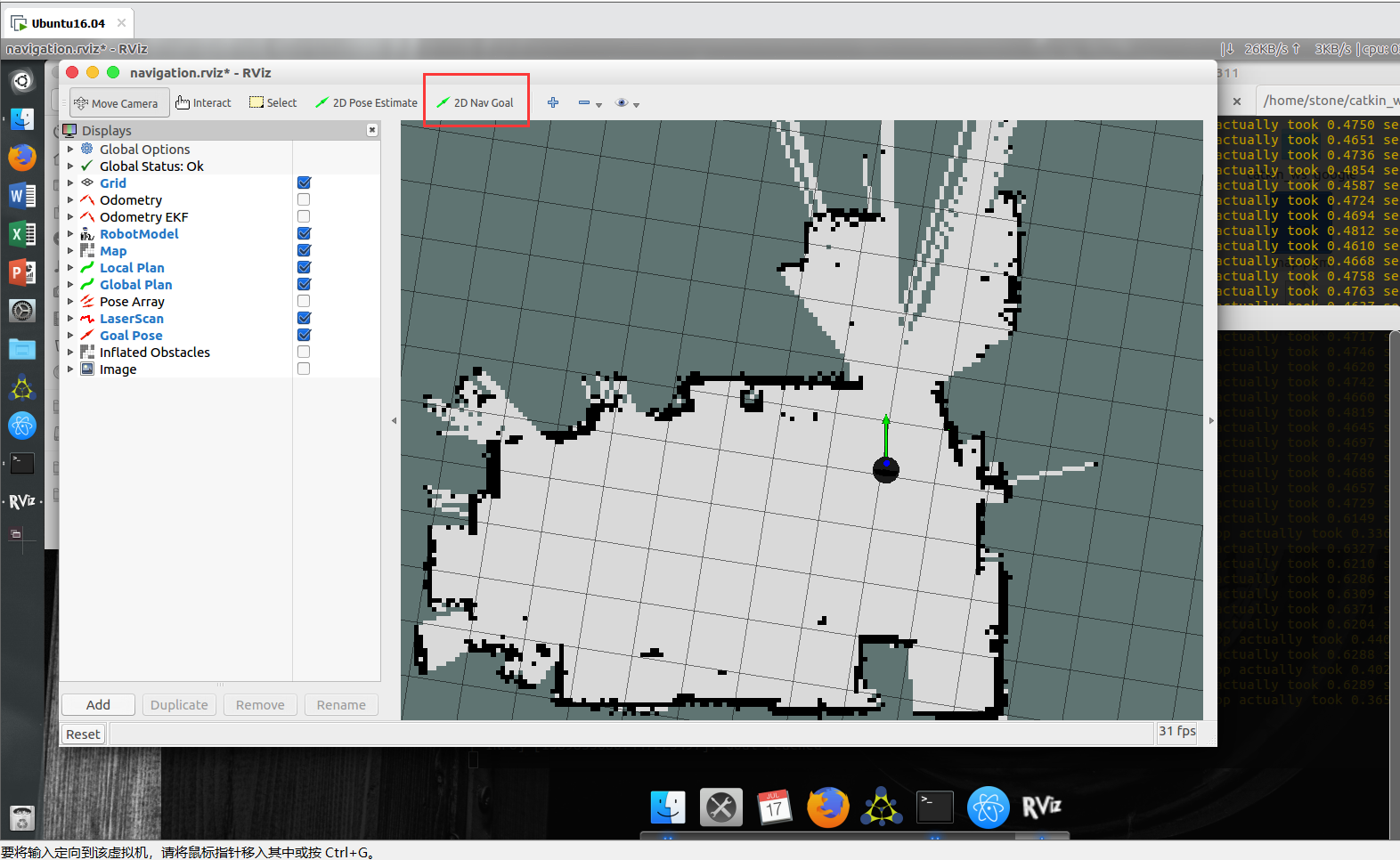
stone@crobot:~$ roslaunch crobot_navigation navigation.launch
//本地启动rviz查看导航过程
dufaxing@ubuntu:~$ roslaunch crobot_navigation navigation_rviz.launch
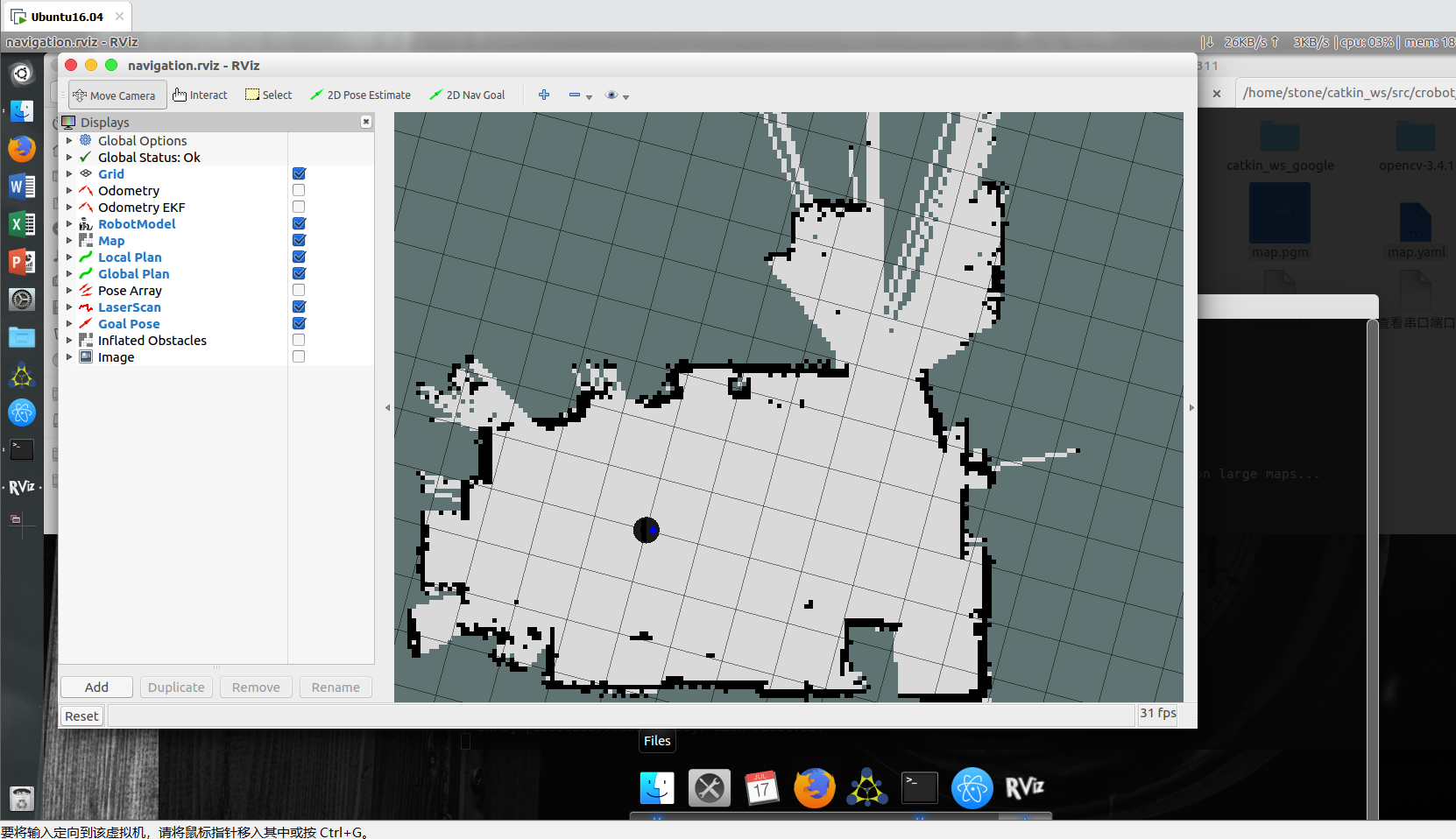
在2D Nav Goal发布导航的目标点,机器人将自主导航至目标。